Description
7Semi BNO055 9-DOF Absolute Orientation Sensor Breakout: Precise Movement Tracking for Your Projects
- 9-Axis Absolute Orientation: Precisely track movement and orientation in 3D space with an accelerometer, gyroscope, and magnetometer.
- Bosch BNO055 Smart Sensor: Combines a tri-axis accelerometer, gyroscope, and magnetometer for reliable measurements of acceleration, angular rate, and magnetic field strength.
- Advanced Sensor Fusion: Sophisticated algorithms ensure unmatched accuracy and stability in orientation data.
- I2C Interface: Effortlessly integrate the sensor into your project using the widely-supported I2C communication protocol.
- Wide Operating Voltage: Compatible with a variety of systems thanks to its 3.3V and 5.0V operating voltage range.
- Low Power Consumption: Extended battery life for portable projects.
- Compact Design: Easily incorporate the sensor into space-constrained applications.
- I2C Interface: Provides straightforward integration into various microcontrollers and development platforms.
- Multiple Address Options: Supports I2C addresses 0x28 (default) and 0x29 for flexible configuration.
-
Absolute Orientation (Euler & Quaternion): Obtain three-axis orientation data for comprehensive analysis.
-
Angular Velocity & Acceleration Vectors: Track rotation speed and linear acceleration with ease.
-
Magnetic Field Strength & Gravity Vectors: Gain valuable insights into magnetic fields and gravitational forces.
-
Temperature Sensor: Monitor ambient temperature for additional project context.
-
Absolute Orientation (Euler Vector, 100Hz) Three axis orientation data based on a 360 degree sphere
-
Absolute Orientation (Quaterion, 100Hz) Four point quaternion output for more accurate data manipulation
-
Angular Velocity Vector (100Hz) Three axis of 'rotation speed' in rad/s
-
Acceleration Vector (100Hz) Three axis of acceleration (gravity + linear motion) in m/s^2
-
Magnetic Field Strength Vector (20Hz) Three axis of magnetic field sensing in micro Tesla (uT)
-
Linear Acceleration Vector (100Hz) Three axis of linear acceleration data (acceleration minus gravity) in m/s^2
-
Gravity Vector (100Hz) Three axis of gravitational acceleration (minus any movement) in m/s^2
-
Accelerometer, Gyroscope, Magnetometer, 9 Axis Sensor I2C
-
Temperature (1Hz) Ambient temperature in degrees celsius
-
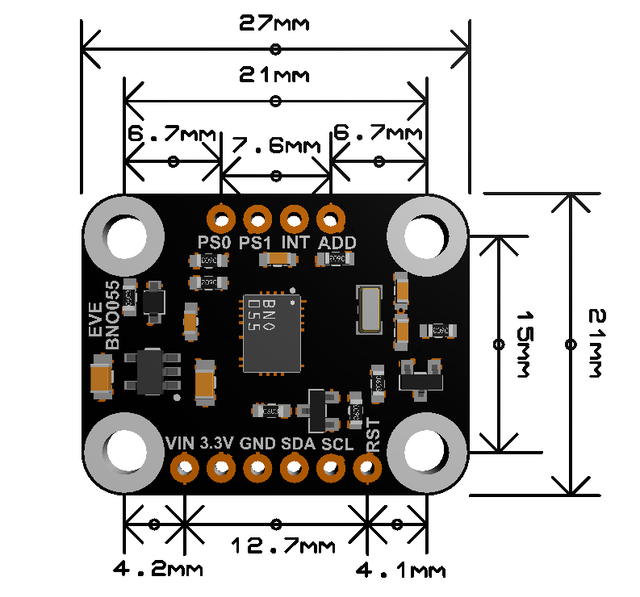
Dimensions: 21mm x 27mm x 4mm
-
Uses I2C address 0x28 (default) or 0x29
Upgrade your project today with the 7Semi BNO055 9-DOF Absolute Orientation Sensor Breakout and experience the difference superior technology can make!
STEMMA QT / Qwiic 4-pin 1mm Pitch White Female Connector Cable 150mm Long - Both Side can be purchased seperately.
The Bosch BNO055 is an intelligent 9-DOF (degrees of freedom) absolute sensor that provides precise and accurate data for orientation sensing. It combines an accelerometer, gyroscope, and magnetometer with a sophisticated fusion algorithm that calculates orientation data with unparalleled accuracy and stability. The BNO055 is designed to operate at a wide range of voltages, making it compatible with a variety of systems. With its advanced features and superior technology, the Bosch BNO055 is widely regarded as one of the best absolute orientation sensors available on the market today.
-
BNO055 breakout
-
1x6 male header
-
1x4 male header
Resources
7Semi BNO055 9-DOF Orientation Sensor Breakout I2C Connections to Arduino

7Semi BNO055 Orientation Sensor Breakout Dimensions